Python Blender addon that converts a 3-point perspective camera to 2-point perspective. Useful for architectural renders.
Finds the closest quarter circle of the camera rotation on the X axis.
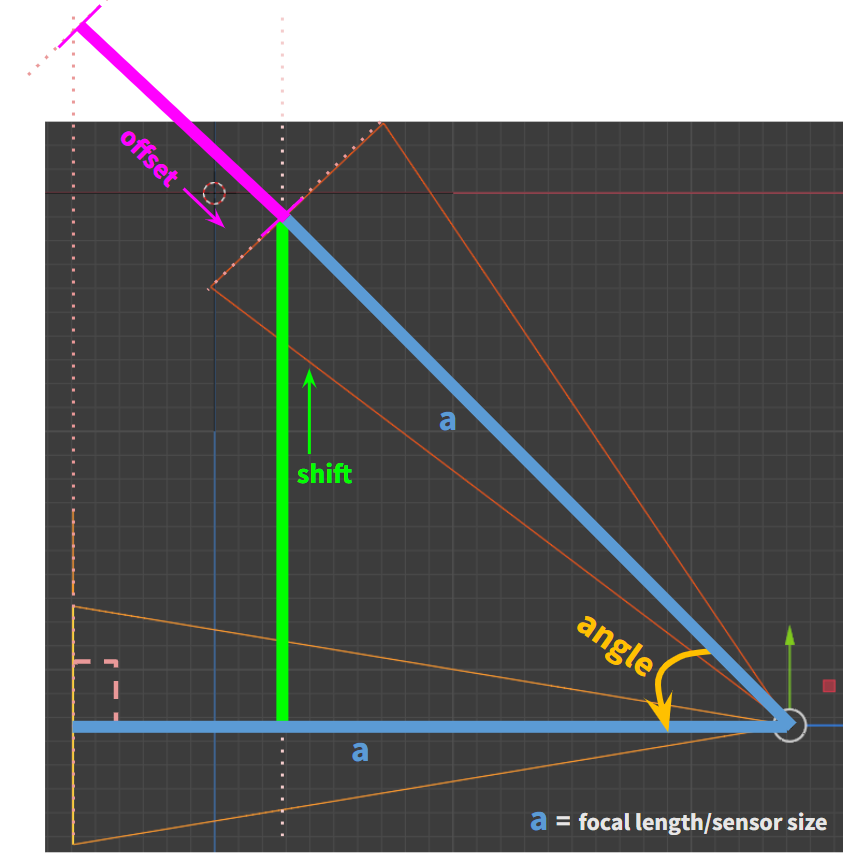
Calculates the a = ( focal length/sensor size), the offset value of the camera object and the shift of the camera (using trigonometry).
Creates a new camera under the same parent.
Applies the shift and the offset to it, and the rotation of the closest quarter circle to the X axis.